
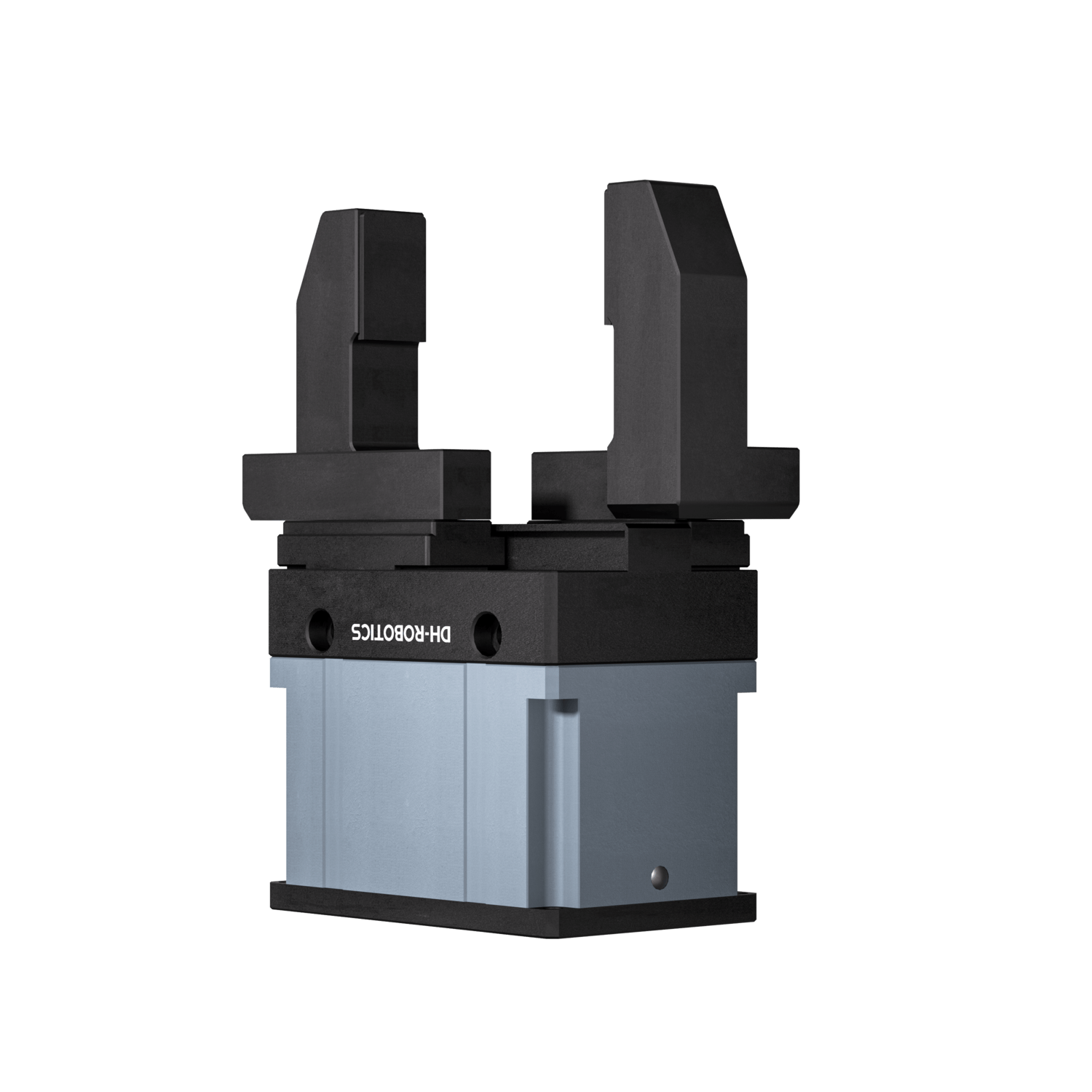




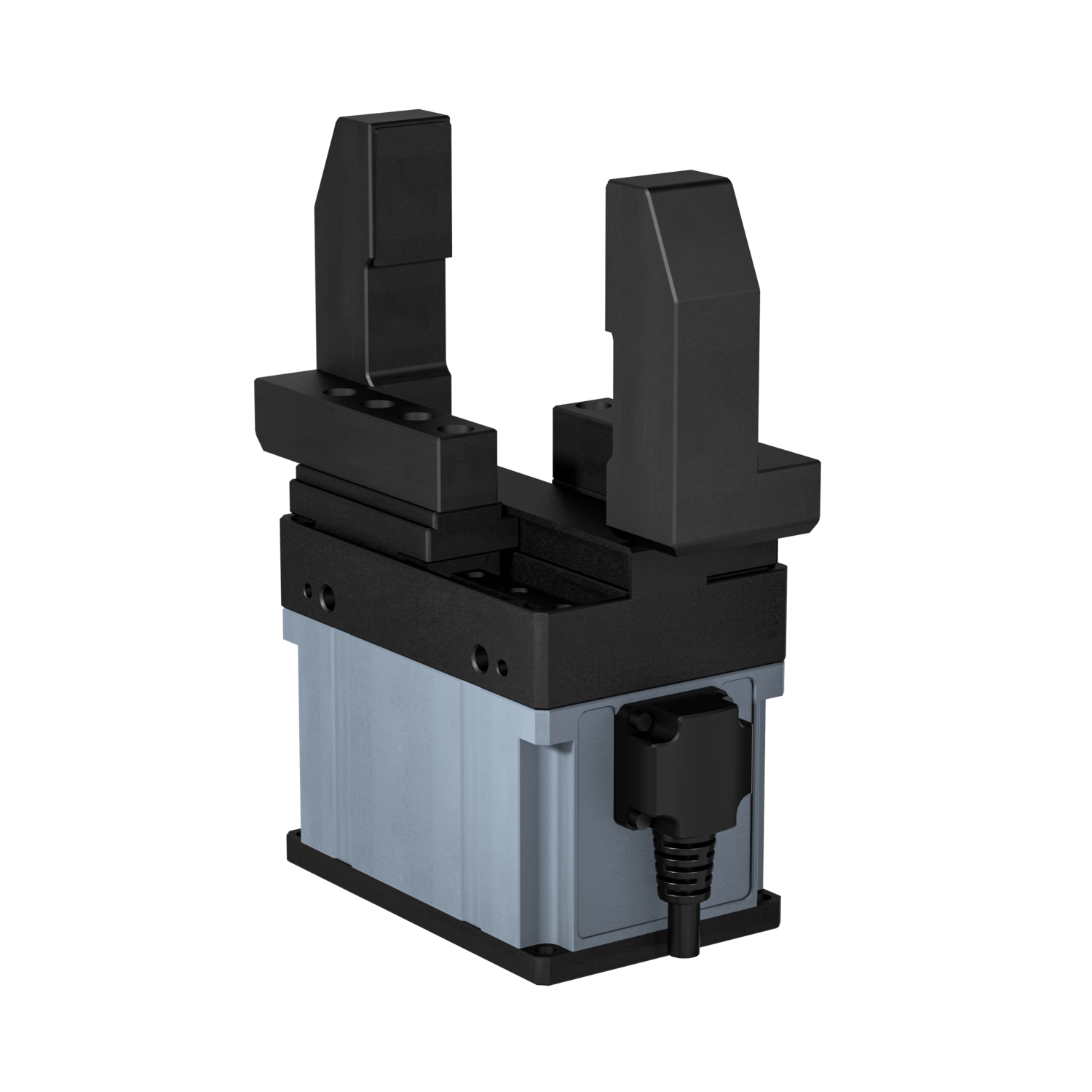
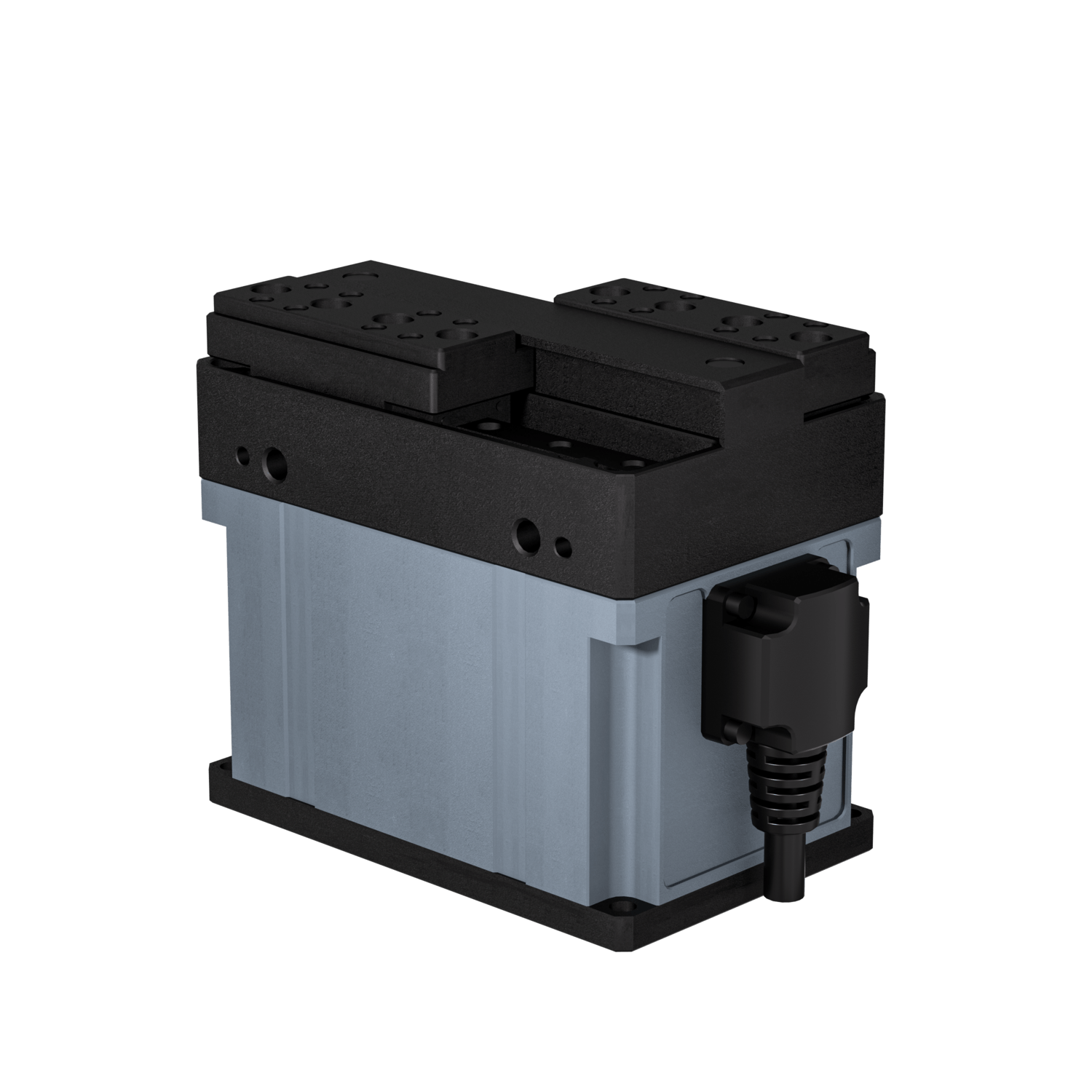
Electric Parallel Gripper
Product Features:
In industrial scenarios, it is used for gripping, handling and assembly of heavy workpieces. Mostly used in new energy, auto parts, machining, 3C electronics and other industries.
| Gripping force (per jaw) | 16~80 N | |
|---|---|---|
| Stroke | 80 mm | |
| Recommended workpiece weight | 1.6 kg | |
| Opening/Closing time | 0.4s 5mm/0.7s 80mm | |
| Repeat accuracy (position) | ± 0.03 mm | |
| Noise emission | < 50 dB | |
| Weight | 1 kg(exclude fingers) | |
| Driving method | Precise planetary gears + Rack and pinion | |
| Size | 95 mm x 61.7 mm x 86 mm | |
| Communication interface | Standard: Modbus RTU (RS485), Digital I/O Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT | |
| Rated voltage | 24 V DC ± 10% | |
| Rated current | 0.5 A | |
| Peak current | 1.2 A | |
| Rated Power | 12W | |
| IP class | IP 54 | |
| Recommended environment | 0~40°C, under 85% RH | |
| Certification | CE,FCC,RoHS | |
| Gripping force (per jaw) | 40~140 N | |
|---|---|---|
| Stroke | 80 mm | |
| Recommended workpiece weight | 3 kg | |
| Opening/closing time | 1.1 s/1.1 s | |
| Repeat accuracy (position) | ± 0.03 mm | |
| Noise emission | < 50 dB | |
| Weight | 1 kg(exclude fingers) | |
| Driving method | Precise planetary gears + Rack and pinion | |
| Size | 95 mm x 61.7 mm x 86 mm | |
| Communication interface | Standard: Modbus RTU (RS485), Digital I/O Optional: TCP/IP, USB2.0, CAN2.0A, PROFINET, EtherCAT | |
| Rated voltage | 24 V DC ± 10% | |
| Current | 0.5 A (Rated)/ 1.2 A (Peak) | |
| Rated Power | 12 W | |
| IP class | IP 54 | |
| Recommended environment | 0~40°C, under 85% RH | |
| Certification | CE,FCC,RoHS | |